Clasificación de los mecanismos leva-seguidor.
Clasificación de los mecanismos leva-seguidor.
Los sistemas de leva-seguidor se pueden clasificar:
Por el tipo de movimiento del seguidor: traslatorio o
rotatorio (oscilatorio).
Por el tipo de leva: radial, cilíndrica, tridimensional.
Por el tipo de cierra de junta: con cierre de forma o de
fuerza.
Por el tipo de seguidor: curvo o plano, rodante o
deslizante.
Por el tipo de restricción de movimiento: posición extrema
crítica (PEC), movimiento en trayectoria crítica (MTC).
Por el tipo de programa de movimiento: de subida-bajada (SB), subida-bajada-paro (SBP), subida-paro-bajada-paro (SPBP).
Tipo de movimiento del seguidor

Ilustración 1 Sistema con
un seguidor rotatorio u oscilatorio

Son análogos a los eslabonamientos de cuatro barras de
manivela-balancín y de manivela-corredera.
Un eslabonamiento de cuatro barras efectivo puede
sustituirse por un sistema de leva-seguidor para cualquier posición
instantánea.
Las longitudes de los eslabones efectivos se determinan por
las localizaciones instantáneas de los centros de curvatura de la leva y el
seguidor.
Las velocidades y aceleraciones del sistema de leva-seguidor
se determinan analizando el comportamiento del eslabonamiento efectivo para
cualquier posición. Los eslabones efectivos cambian de longitud conforme se
mueve la leva-seguidor, lo que le da una ventaja sobre un eslabonamiento puro,
ya que éste permite mayor flexibilidad al cumplir las restricciones de movimiento
deseado.
La opción entre estas dos formas de leva-seguidor
generalmente se decide por el tipo de movimiento de salida deseado. Si se
requiere de una traslación rectilínea real, entonces se elige el seguidor
traslatorio. Si se necesita de una rotación pura de salida, entonces el
oscilatorio es la opción obvia. Existen ventajas para cada uno de estos
enfoques, independientemente de sus características de movimiento, de acuerdo
con el tipo de seguidor elegido
Tipo de cierre de junta
Se analizan el cierre de fuerza y forma. El cierre de fuerza
requiere que se aplique a la junta una fuerza externa para mantener los dos
eslabones, la leva y el seguidor, en contacto físico, usualmente esta fuerza es
proporcional por el resorte. No se puede permitir que esta fuerza, definida
como positiva en una dirección que cierra la junta, se convierta en negativa.
Si esto ocurriera los eslabones habrían perdido contacto debido a que una junta
con cierre de fuerza sólo se puede impulsar, no arrastrar. El cierre de forma cierra
la junta por geometría. No se requiere de ninguna fuerza externa. En realidad,
hay dos superficies de leva en esta combinación, una superficie en cada lado
del seguidor. Cada superficie se empuja, en su turno, para impulsar el seguidor
en ambas direcciones.
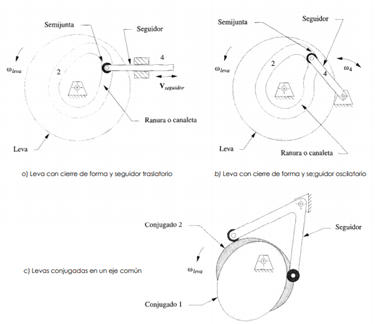
Ilustración 3 Tipo de
cierre por junta
Ilustración 3 a) y b) se muestran levas de ranura o pista
que toman al seguidor por la ranura y se impulsan y arrastran sobre el
seguidor. Ilustración 3 c) se muestra otra variedad de combinación de leva-
seguidor con cierre de forma, denominada de levas conjugadas.
Hay dos levas fijas sobre un eje común que son conjugados
matemáticos entre sí. Dos seguidores rodantes, conectados a un brazo común, se
empujan en direcciones opuestas por las levas conjugadas. Cuando se usan levas
con cierre de forma en trenes de válvulas de motor de automóvil o motocicleta
se llaman levas desmodrómicas.
Tipo de seguidor
El seguidor se refiere solamente a dicha parte des eslabón
seguidor que está en contacto de la leva.

En la ilustración 4 se muestran tres combinaciones comunes,
de cara plana, de hongo (curva) y de rodillo. El seguidor de rodillo tiene la
ventaja de tener fricción baja (rodante) a diferencia del contacto deslizante
de los otros dos, pero puede ser más costoso. Los seguidores de cara plana
pueden compactarse más que los seguidores de rodillo para ciertos diseños de
levas, por lo que usualmente suelen preferirse. Los seguidores de rodillo se
usan con más frecuencia en la maquinaria de producción por las ventajas que
implica la facilidad de remplazarías y la disponibilidad de existencias de
producción de los fabricantes en cualquier cantidad. Las levas de ranura o de
pista requieren seguidores de rodillo. Los seguidores de rodillo son
esencialmente cojinetes de bolas o rodillos con detalles de montaje a la
medida.
Tipo de leva
La dirección del seguidor con respecto al eje de rotación de la leva determina si es una leva radial o axial. Se denomina radial debido a que generalmente el movimiento del seguidor está en una dirección radial. A las levas radiales abiertas también se les denomina levas de placa.

Ilustración 5 Leva axial
La leva axial cuyo seguidor se mueve paralelamente al eje de
rotación de la leva. A esta combinación se le denomina también leva de cara si
es abierta (con cierre de fuerza) y leva cilíndrica o de birrete si es ranurada
o acanalada (con cierre de forma).
Una leva tridimensional o levoide es una combinación de
levas radiales y axiales. Es un sistema con dos grados de libertad. Las dos
entradas son la rotación de la leva con respecto a su eje y la traslación de la
leva a lo largo de su eje. El movimiento del seguidor es una función de ambas
entradas. El seguidor se mueve a lo largo de una parte diferente de la leva
dependiendo de su entrada axial.
Tipos de restricción del movimiento
Existen dos categorías generales de restricción del movimiento:
la posición extrema crítica (PEC); también llamada especificación de punto
final, y el movimiento de trayectoria crítica (MTC). La posición extrema
crítica se refiere al caso en el que las especificaciones de diseño definen las
posiciones inicial y final del seguidor (posiciones extremas), pero no
especifican ninguna restricción sobre el movimiento de trayectoria entre las
posiciones extremas.
El movimiento de trayectoria crítica es un problema más
restringido que el PEC debido a que el movimiento de trayectoria, y/o uno más
de sus derivados se definen dobre todo o parte del intervalo de movimiento. Esto
es análogo a la generación de función en el caso de diseño de eslabonamiento,
excepto que con una leva se puede llevar a cabo una función de salida continua
para el seguidor.
Tipo de programa de movimiento
Los programas de movimiento de subida-bajada (SB),
subida-bajada-paro (SBP) y de subida-paro-bajada-paro (SPBP) se refieren
principalmente al caso de restricción de movimiento PEC y en efecto definen
cuántos detenimientos se presentan en el ciclo completo de movimiento, ya sea
ninguno (SB), uno (SPB) o más de uno (SPBP). Los detenimientos, definidos como
ningún movimiento de salida durante un periodo especificado de movimiento de
entrada, son una característica importante de los sistemas de leva-seguidor,
debido a que es muy fácil crear detenimientos exactos en estos mecanismos. La
leva-seguidor es el tipo de diseño escogido siempre que se requiere un
detenimiento.
Los sistemas de leva-seguidor tienden a ser más compactos
que los eslabonamientos para el mismo movimiento de salida.
Si necesita tener un movimiento PEC con subida-bajada (SB),
sin detenimiento, entonces debe estar considerando realmente un eslabonamiento
de manivela-balancín en lugar de uno de leva-seguidor para obtener todas las
ventajas del eslabonamiento sobre las levas, de seguridad, facilidad de
construcción y bajo costo.
Si lo que necesita es reducir el tamaño valore esas
consideraciones, entonces puede justificarse la opción de una leva-seguidor en
el caso de SB. O bien, si tiene una especificación de diseño MTC, y el
movimiento o sus derivados se definen sobre el intervalo, entonces la opción
lógica en el caso de SB sería un sistema de leva-seguidor.
Los casos de subida-bajada-paro (SBP) y
subida-paro-bajada-paro (SPBP) son opciones obvias de leva-seguidor por las
razones antes analizadas. Sin embargo, cada uno de estos dos casos tiene su
propio conjunto de restricciones sobre el comportamiento de las funciones de la
leva en las interfaces entre los segmentos que controlan la subida, la bajada y
los detenimientos. En general, se deben acoplar las condiciones de frontera
(CF) de las funciones y sus derivadas, en todas las interfaces entre los
segmentos de la leva.
Referencias bibliográficas:
[1] R. L. Norton, Diseño de maquinaria, México D. F.: McGraw-Hill, 2013.

Comentarios
Publicar un comentario